
Autonomy Across Domains: How SYNNQ Defense Operates Without Continuous Control
Autonomy in modern defense systems is no longer confined to a single platform type. Airborne interceptors, ground vehicles, and maritime systems increasingly operate as part of a shared operational fabric rather than as isolated assets.
In this context, autonomy is not defined by whether a system is remotely controlled or fully independent. It is defined by how well the system continues to function when coordination is delayed, constrained, or incomplete—conditions that are normal rather than exceptional in real operations.
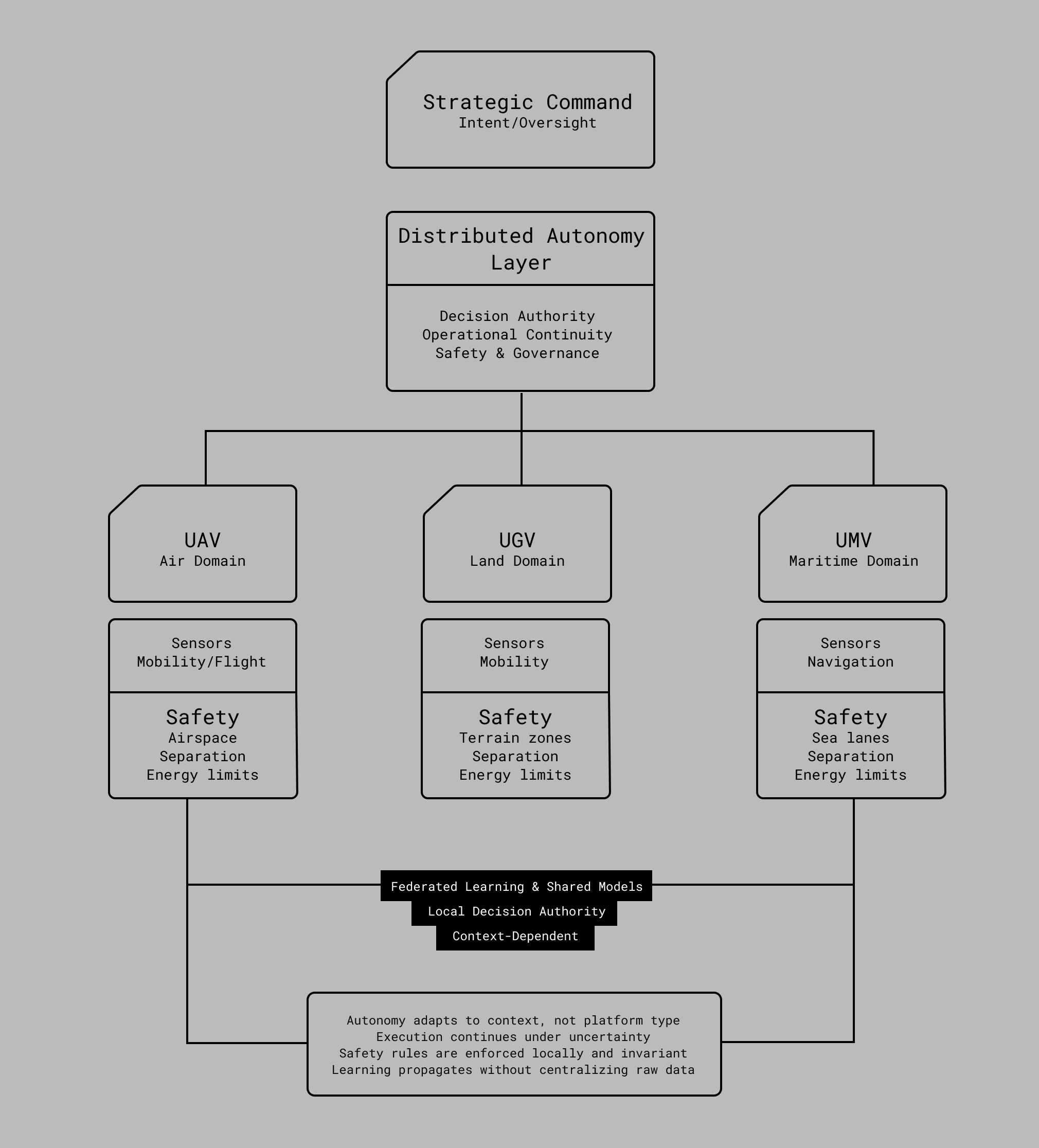
SYNNQ Defense treats autonomy as a cross-domain architectural principle spanning UAVs, UGVs, and UMVs. It governs how systems decide, how they persist through uncertainty, and how they remain bounded by safety and policy constraints.
1. Decision Authority: Distributed Control Across Air, Land, and Sea
Across all domains, the central challenge of autonomy is determining where decision authority resides at any given moment.
In SYNNQ Defense, authority is not fixed to a command node or a specific vehicle class. It shifts dynamically based on operational context, mission phase, and time sensitivity. UAVs conducting aerial interception, UGVs operating in contested terrain, and UMVs patrolling maritime environments all face situations where waiting for centralized approval is impractical.
Autonomy ensures that local systems can act when external coordination cannot keep pace with physical reality. This does not remove command oversight; it prevents decision latency from becoming an operational liability.
By allowing authority to migrate toward the edge when necessary, SYNNQ Defense avoids rigid control hierarchies that break down under pressure.
2. Operational Continuity: Persistence Under Uncertainty
Autonomous systems must continue operating even when information is incomplete or coordination is partial. This requirement applies equally to aerial, ground, and maritime platforms.
In SYNNQ Defense, operational continuity is achieved through onboard intelligence and distributed learning. Local decision logic enables systems to maintain mission execution when guidance is delayed or temporarily unavailable. Over time, these local behaviors improve through federated learning, allowing lessons from one domain to inform others without centralizing sensitive data.
Flight control, navigation, mobility, and task execution are designed to function independently of continuous command input. A UAV maintains pursuit or surveillance, a UGV continues maneuvering through terrain, and a UMV sustains patrol or interdiction behavior based on local state and mission context.
This approach prevents brittle behavior where loss of coordination leads to inactivity. Instead, systems degrade capability selectively while preserving the ability to act.
3. Safety and Governance: Hard Boundaries for Autonomous Action
While autonomy expands operational freedom, it does not relax safety or governance constraints.
Across UAVs, UGVs, and UMVs, SYNNQ Defense enforces invariant safety boundaries directly on the platform. These include spatial restrictions, separation rules, energy management, and mission-specific constraints. These rules are enforced locally to ensure they remain effective regardless of external connectivity.
Autonomy operates within these boundaries rather than outside them. The system is designed so that increased local decision authority does not translate into uncontrolled behavior.
This separation of autonomy and safety is central to making autonomous systems acceptable within regulated defense environments. It ensures that autonomy enhances resilience without undermining accountability.
Autonomy as a Unified Defense Layer
A key feature of SYNNQ Defense is that autonomy is not implemented separately for each platform type. It is a shared layer across air, land, and maritime systems.
UAVs, UGVs, and UMVs participate in the same intelligence fabric, share learning through federated mechanisms, and adhere to consistent decision and safety principles. This allows heterogeneous systems to cooperate without requiring uniform hardware, software, or mission profiles.
Autonomy becomes a system-level property rather than a platform-specific feature.
Modern defense operations are distributed by nature. Assets operate across domains, under uncertainty, and at speeds that challenge centralized control.
SYNNQ Defense addresses this reality by treating autonomy as an architectural principle that governs decision authority, operational continuity, and safety across UAVs, UGVs, and UMVs. It allows systems to act when coordination lags, persist when conditions degrade, and remain bounded by defined constraints.
In doing so, autonomy becomes not an exception to command, but a mechanism that preserves intent when perfect control is no longer possible.